Comme tous les 26 mois, cycle imposé par la mécanique céleste, les Terriens vont envoyer vers Mars une nouvelle « volée » de robots explorateurs. Ils partiront entre le 17 juillet et le 5 août et arriveront quelques 9 mois plus tard dans le voisinage de Mars. Cette fois ci les missions sont originaires des Etats-Unis, des pays membres de l’ESA avec un lanceur russe, de la Chine et des Emirats Arabes Unis avec un lanceur japonais.
Toutes n’ont pas les mêmes chances de succès, c’est-à-dire de mise en orbite autour de Mars et surtout d’atterrissage à sa surface. En réalité seuls les Etats-Unis ont démontré leur capacité aussi bien à la mise en orbite qu’à la descente en surface, c’est-à-dire à effectuer avec succès la difficile succession de manœuvres de l’« EDL » (« Entry, Descent, Landing ») et il a quand même fallu un peu de temps pour effectuer cette démonstration. C’est pour cela que les statistiques sur expériences passées qui prétendent prouver les faibles chances d’atterrir avec succès sur Mars sans se référer à l’identité du lanceur ni à la période de lancement, n’ont aucun sens, et elles en ont d’autant moins si on prend en compte toute la série des tentatives. Tous pays du monde confondus, il y a eu 54 lancements pour Mars depuis 1960 dont 11 pour « flyby » et « assistance gravitationnelle » (survols simples et survols pour aller plus loin que Mars), 25 pour mise en orbite et 18 pour atterrissage. Les Américains ont effectué 23 lancements, ils ont échoué 5 fois mais la dernière fois c’était il y a très longtemps, en 1999, avec Mars Polar Lander, et sur les 5, ils n’ont échoué qu’une seule fois à se poser (le même Mars Polar Lander). Il n’y a eu aucun autre échec depuis cette date (10 lancements réussis en série). Les Russes par contre ont effectué 22 lancements, ils ont échoué 19 fois et n’ont réussi que 3 opérations dont un flyby, une seule mise en orbite (pour la mission MarsExpress de l’ESA, en utilisant leur lanceur Soyouz) et aucun atterrissage. Les Européens n’ont réussi, seuls (avec leur lanceur Ariane 5G+), qu’une opération, la mise en orbite de la première partie de la mission ExoMars (Trace Gas Orbiter) en 2016 tandis que la partie atterrissage (Schiaparelli) a échoué. L’autre opération, Mars Express, a (comme dit plus haut) été réalisée avec un lanceur russe. Le Japon a tenté et échoué une fois, l’Inde a tenté et réussi un fois (mise en orbite de Mangalyaan). Enfin on ne peut compter dans les mêmes statistiques les tentatives des années 1960 et celles d’aujourd’hui. Les technologies ont évolué et les Américains ont appris très vite à faire ce qu’ils ne savaient pas faire, pour la bonne raison qu’ils n’avaient pas essayé !
Toutes les missions 2020 n’ont pas le même potentiel scientifique.
Les Emirats Arabes Unis, avec la « Hope Mars Mission », envoie un « démonstrateur technologique », c’est-à-dire qu’ils veulent montrer qu’ils sont capables de participer à une mission pour aller jusqu’à l’orbite de Mars et y déployer des instruments scientifiques. Il s’agit « simplement » d’envoyer, de placer et d’utiliser un orbiteur (satellite) ; pas question de tenter de descendre au sol pour une première mission. Officiellement Hope (ou « al-Amal ») va étudier l’atmosphère et le climat au sol avec deux spectromètres, l’un opérant dans l’infrarouge pour mesurer la variabilité de la thermosphère et les pertes d’hydrogène et d’oxygène, l’autre dans l’ultraviolet pour étudier, dans l’atmosphère moyenne et basse, les températures, la vapeur d’eau et les variations de teneur en poussière. Le lanceur, japonais, H-IIA de Mitsubishi est un lanceur fiable qui a propulsé de nombreuses missions dont quelques-unes dans l’espace profond. L’opération, mineure sur le plan scientifique, a donc de bonnes chances de succès.
La Chine veut lancer un orbiteur et un atterrisseur « Mars Global Remote Sensing Orbiter and Small Rover », mission plutôt connue comme « Huoxing-1 » ou « HX-1 ». C’est aussi une première puisque jusqu’à présent ce pays n’a lancé que vers la Lune. Au-delà de la démonstration ingénieuriale et politique, l’objet sera la recherche de traces passées ou présentes de vie et l’« évaluation de la surface et de l’environnement de la planète », expression plutôt vague qui annonce un travail de cartographie géologique. La mission devrait aussi préparer un retour d’échantillons sur Terre. Bien sûr le vecteur sera chinois, une fusée « Long March 5 » ou « Changzheng 5 » ou « CZ-5 » ; lanceur lourd dont le « track-record » est extrêmement faible ; seulement une seule opération menée à bien sur trois tentées, le placement d’un satellite sur une orbite géostationnaire. On peut donc craindre un échec.
Les deux missions les plus sérieuses sont les missions européennes et américaines. La mission européenne ExoMars qui doit déposer au sol le rover Rosalind Franklin est évidemment la moins certaine puisqu’elle suppose le succès d’une technique d’atterrissage jamais maîtrisée par l’ESA et c’est d’autant plus inquiétant que ce n’est pas faute d’avoir essayé : le test qui devait être mené avec l’atterrisseur Schiaparelli en 2016 (avec la première partie de la mission ExoMars) a échoué.
Les équipements du rover qui doit être déposé sur Mars sont ambitieux et j’aimerais vraiment qu’ils puissent fonctionner car la mission est passionnante et très bien préparée sur le plan scientifique. Il s’agit aussi de rechercher la vie, passée ou présente. A noter à ce propos que la britannique Rosalind Franklin, docteure en physico-chimie décédée en 1958, a participé « de manière déterminante » à la découverte de la structure de l’ADN (ce qui n’a pas empêché ses collègues masculins de l’« oublier » lorsqu’en 1962 ils ont reçu le prix Nobel pour cette découverte !). Le rover disposera d’un foret et de neuf instruments d’analyse. Le foret doit pouvoir atteindre une profondeur de 2 mètres. A ce niveau, les radiations spatiales sont fortement atténuées et il peut y avoir plus d’humidité (provenant de glace d’eau chargée en sels et non sublimée du fait de la protection du sol) donc évidemment de la vie (si elle existe !) ou des traces d’évolution vers la vie (« prébiotiques ») ce qui à mon avis est plus vraisemblable. Les échantillons prélevés par le foret seront examinés à l’intérieur du rover par divers dispositifs embarqués. Toutes les opérations du rover seront photographiées avec des caméras d’une précision inégalées pour donner le contexte et permettre de voir les échantillons prélevés avant de les traiter à l’intérieur du rover. Les instruments sont très cohérents et complets pour leur objectif : PanCam (Panoramic Camera), deux caméras grand angle (les yeux du rover) et une caméra à haute résolution, avec téléobjectif, pour l’appréhension et la cartographie digitale du terrain (les trois sont situées dans la « tête », au bout du mât du rover) ; ISEM (Infrared Spectrometer for ExoMars) pour évaluer à distance la composition minéralogique des cibles identifiées via PanCam (situé également dans la tête du rover) ; WISDOM (Water Ice and Subsurface Deposit Observation on Mars), un radar pour caractériser la stratigraphie dans l’environnement immédiat du rover ; WISDOM sera utilisé avec ADRON-RM, un détecteur de neutrons, pour donner des informations sur le contenu en eau (hydrogène) du sous-sol et orientera donc le choix des forages pour collecte d’échantillons ; Ma_MISS (Mars Multispectral Imager for Subsurface Studies), un spectromètre situé à l’intérieur du foret et qui va étudier la minéralogie environnante en éclairant la paroi du forage au fur et à mesure de la descente (c’est lui qui va faire la première étude des échantillons potentiels, avant prélèvement et transmission au laboratoire embarqué) ; CLUPI (Close Up Imager)*, une caméra pour acquérir des images en couleurs, à haute résolution, des cibles approchées, des rejets de forage et des échantillons prélevés (comme la caméra CASSiS de l’orbiteur TGO, « CLUPI » pourra utiliser plusieurs angles d’inclinaisons successifs, restituant au mieux les volumes et permettant de mieux interpréter ce qu’on voit) ; MicrOmega, un spectromètre imageur infrarouge (résolution de 20 x 20 µm par pixel) qui va étudier la minéralogie des échantillons prélevés ; RSL, un spectromètre laser Raman qui doit étudier les roches à distance ; il va en dire la composition minéralogique et identifier les composants organiques ; MOMA (Mars Organic Molecule Analyser), un chromatographe en phase gazeuse (il y en a un aussi dans le laboratoire embarqué SAM de Curiosity) ; il examinera les éventuels biomarqueurs qu’il pourrait trouver, pour répondre aux questions relatives à l’origine, l’évolution et la distribution de la vie sur Mars.
* petit salut « en passant » à mon ami Jean-Luc Josset et son équipe du Space Exploration Institute – Space-X – de Neuchâtel, qui l’ont conçue ainsi que la caméra grand angle de PanCam. Jean-Luc Josset est PI de CLUPI et co-PI de PanCam.
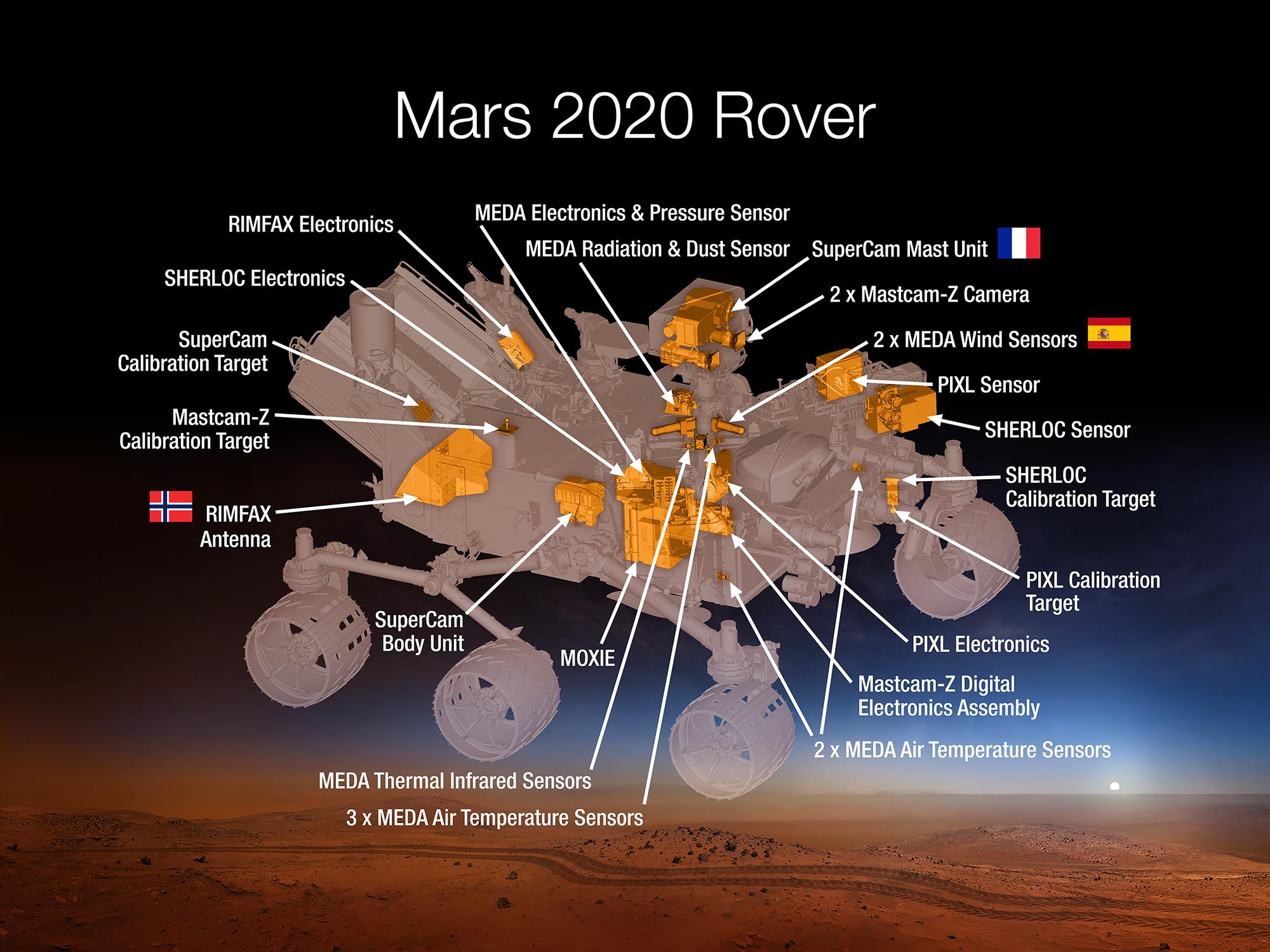
Le rover Mars 2020 de la NASA est, à mon avis, relativement moins intéressant. Il est la suite de Curiosity et a pour objet de rechercher aussi les traces de vie passée (Curiosity cherchait à savoir si Mars avait été habitable, ce qui n’est pas la même chose), de préparer un futur retour d’échantillons et de préparer la venue de l’homme sur Mars. Il comprend 7 instruments qui sont pour plusieurs d’entre eux des améliorations de ceux qui équipent aujourd’hui Curiosity. Le Mastcam-Z est une caméra panoramique et stéréoscopique avec une forte capacité de zoom. Ce sera les yeux du rover et elle aura un rôle à jouer dans l’identification minéralogique. MEDA (Mars Environmental Dynamics Analyzer) est un ensemble de capteurs qui donneront toutes indications sur le temps qu’il fait (y compris le contenu en poussière de l’atmosphère et la taille des particules). MOXIE (Mars Oxygen ISRU Experiment) est un instrument qui doit tester la possibilité de produire de l’Oxygène à partir de du dioxyde de carbone de l’atmosphère martienne (une des recommandations faites par Robert Zubrin dans les années 1990). PIXL (Planetary Instrument for X-Ray Lithochemistry) est un spectromètre à fluorescence de rayons X avec un imageur à haute résolution pour déterminer la composition des roches de surface. Le but est de permettre une analyse chimique plus fine que précédemment. RIMFAX (Radar Imager for Mars’ Subsurface Experiment) est un radar qui doit permettre de déterminer la structure géologique du sol à l’échelle du centimètre (jusqu’à une profondeur d’une dizaine de mètres). SHERLOC (Scanning Habitable Environments with Raman & Luminescence of Organics & Chemicals) est un spectromètre qui doit déterminer la minéralogie à petite échelle et détecter les composés organiques. SuperCam est une sorte de ChemCam (embarquée sur Curiosity) améliorée. L’instrument pourra détecter à distance la présence de composés organiques dans le régolithe ou les roches.
En plus de ces instruments, le rover disposera, comme son prédécesseur, d’un bras robotique avec un foret capable de prélever des échantillons qui seront soit analysés sur place, soit préservés dans une « cache » en attendant une mission de retour d’échantillons fin des années 20 ou début des années 30 (c’est loin et c’est vraiment frustrant !). Les prélèvements resteront très superficiels (le foret prévu n’est pas celui de Rosalind Franklin !). Enfin la mission débarquera un petit hélicoptère pour tester la possibilité d’utiliser ce type de véhicule dans les explorations futures. C’est intéressant car il est vrai que l’exploration martienne souffre de devoir se faire avec un rover qui roule sur un sol par définition non préparé à la circulation des véhicules à roues. On a vu que Spirit est mort d’avoir pénétré dans des sables mouvants et que les roues de Curiosity ont très vite été très abimées et qu’il ne peut aller « partout ». Il est impossible d’aller observer/analyser un site intéressant même à quelques mètres s’il est inaccessible au rover et hors de portée de sa ChemCam. Ceci dit ce premier hélicoptère n’aura qu’une autonomie très limitée et n’embarquera qu’une caméra. Espérons qu’il vole!
Ces missions vont s’ajouter à celles qui sont encore en cours. D’abord les orbiteur de l’ESA, ExoMars-TGO, « en pleine forme » (fin de mission prévue en 2022), et Mars Express qui continuera ses observations jusqu’à fin 2020 ; puis les orbiteurs de la NASA, MRO, le Mars-Reconnaissance-Orbiter avec sa camera HiRISE qui nous donne toujours des photos d’une précision extraordinaire (résolution jusqu’à 0,3 mètre par pixel) et qui a été prolongé, le vieux 2001-Mars-Odyssey qui a suffisamment d’énergie pour fonctionner jusqu’en 2025 et MAVEN qui a terminé sa mission mais communique encore, sans oublier en orbite le démonstrateur Mangalyiaan de l’Inde, et au sol le rover Curiosity au sol ainsi que la sonde InSight qui continue à faire de la sismographie. MRO, Mars Odyssey, MAVEN et MarsExpress serviront de relais aux nouveaux rovers pour les télécommunications vers la Terre.
L’exploration de Mars continue donc. Le thème de la vie est vraiment ce qui caractérise la génération des missions 2020. Nous pouvons espérer de nouvelles informations passionnantes et de toute façon une meilleure connaissance de cette planète, la plus semblable à la Terre et la seule sur laquelle on puisse envisager d’aller physiquement avec les technologies d’aujourd’hui et où j’espère on finira par aller un jour pas trop éloigné. La lente progression qu’a entrepris la NASA vers cet objectif (années 2040 ?) pourrait être, heureusement, accélérée par Elon Musk qui veut mener une première expédition habitée en 2024 (mais si cette date était reculée à 2026, ce ne serait pas trop grave). Espérons qu’il pourra finaliser son lanceur SuperHeavy et son vaisseau Starship et que les tenants de la protection planétaire ne lui mettront pas des bâtons dans les roues en empêchant son décollage ou plutôt son atterrissage sur Mars ! En attendant je vous souhaite, chers lecteurs, un bon début d’année.
Illustration : lancement par un Atlas 5-541 (développé par ULA pour l’armée de l’air américaine depuis 1997) le 26 novembre 2011 de la mission MSL (Curiosity). Crédit ULA (United Launch Alliance = Boeing et Lockheed Martin). Le lancement de Mars-2020 utilisera aussi un Atlas 5-541.
Pour (re)trouver dans ce blog un autre article sur un sujet qui vous intéresse, cliquez sur: