
L’arrivée sur Mars des premiers vols habités sera un moment difficile pour les astronautes pour diverses raisons mais en particulier pour celle du retour à la gravité après un séjour de quelques six mois en apesanteur.
Bien entendu on peut envisager un système de gravité artificielle pendant le voyage. Il s’agirait de mettre en rotation l’habitat du vaisseau spatial ou le vaisseau spatial tout entier (avec une autre masse l’équilibrant), ce qui générerait à l’intérieur une force centrifuge. Cette force serait contenue, contrée, par la paroi du vaisseau qui deviendrait de ce fait le plancher de l’habitat. Les passagers bénéficieraient ainsi d’un environnement gravitaire équivalent à celui dont on bénéficie sur le sol d’une planète, le nombre de rotations par minute en fonction de la longueur du lien entre les masses en rotation, permettant d’en moduler l’intensité. Mais il n’est pas certain que la technologie pour le fonctionnement de ce système soit démontrée et certifiée suffisante (« TRL 9 », Technology Readyness Level 9) avant le premier vol et donc qu’elle soit utilisée (2031 avec le Starship ?). Par ailleurs, elle ne pourrait pas être mise en service avant l’injection interplanétaire car elle suppose une certaine stabilité du système et que cette stabilité est incompatible avec la force de gravité terrestre ressentie en orbite de parking puis avec l’accélération subie lors de l’injection à partir de cette orbite. Au cas où elle ne fonctionnerait pas (pour toutes sortes de raisons), il n’y aurait pas de retour possible sur Terre pour réparer le disfonctionnement du système, avant d’arriver dans l’environnement martien. Il y aura donc toujours un risque que les astronautes arrivent très affaiblis sur Mars pour avoir voyagé six mois en apesanteur. Ils seront de ce fait pratiquement incapables de se mouvoir et d’agir physiquement alors qu’ils devraient le faire, ne serait-ce que pour des raisons de sécurité.
Le phénomène d’affaiblissement résultant de l’apesanteur est bien connu. Lorsqu’ils reviennent sur Terre les astronautes ont perdu un pourcentage non négligeable de leur masse musculaire et de leur masse osseuse en dépit de l’exercice physique qu’ils ont pu faire à bord. Ils ont aussi du mal à retrouver leur équilibre (leur sens de la verticalité). Tout mouvement leur coûte énormément d’attention et d’effort ; de plus, les évanouissements résultant d’une tension artérielle trop faible ne sont pas rares. La récupération est d’autant plus longue que le séjour a été long.
A l’arrivée du premier vol sur Mars et sans doute de plusieurs des vols suivants (dans la mesure où une présence permanente de maintenance ne sera pas décidée avant expériences répétées de séjour), il n’y aura pas sur place de « comité d’accueil », pas d’autres êtres humains pour les aider et les taches à exécuter à l’arrivée seront nombreuses. Les robots devraient effectuer la plupart d’entre elles mais évidemment pas toutes et certaines ne pourront être menées à bien sans qu’eux-mêmes bougent et « se bougent », notamment pour la surveillance de l’action de ces robots et pour prendre soin d’eux-mêmes. Le fait que la gravité martienne ne soit que de 0,38g sera un facteur favorable à un rétablissement rapide mais certainement insuffisant pour considérer ce problème comme mineur.
Il faudra donc que les astronautes disposent d’exosquelettes pour pallier l’incapacité temporaire de leur corps et faire face à leurs diverses obligations. A noter qu’à la différence des handicapés vivant sur Terre, leur système nerveux sera intégralement fonctionnel mais que la réponse musculaire sera insuffisante au niveau de leurs quatre membres, de leur torse, de leur dos, de leur cou, que leurs os seront fragilisés, que leur sens de l’équilibre aura été altéré. Ils devront aussi pouvoir très rapidement se mettre à l’horizontale sans tomber pour éviter (ou récupérer d’) un black-out résultant d’une insuffisante irrigation du cerveau (risque que l’on peut en principe limiter en portant des jambières compressant les jambes).
L’exosquelette devra pouvoir répondre aux impulsions données par les différents muscles qui seront les interfaces entre le système nerveux et le milieu extérieur à leur corps. Il devra aussi répondre à des commandes manuelles exercées par les doigts sur clavier pour maintenir de façon autonome l’équilibre du corps debout ou dans les positions intermédiaires. Il devra aussi bénéficier d’une certaine autonomie pour le maintien de l’équilibre et éventuellement pour prendre en charge le corps et l’incliner en cas d’évanouissement pour accentuer la circulation sanguine dans le cerveau.
Par ailleurs, il devra démultiplier la force des astronautes car il y aura des tâches physiques à accomplir (déplacer des masses, débloquer des attaches ou des articulations, faire levier pour dégager une caisse tombée ou un équipement sorti de son rail, etc…).
L’exosquelette devra donc réunir les capacités utilisées pour la locomotion des handicapés aussi bien que pour des travaux de force.
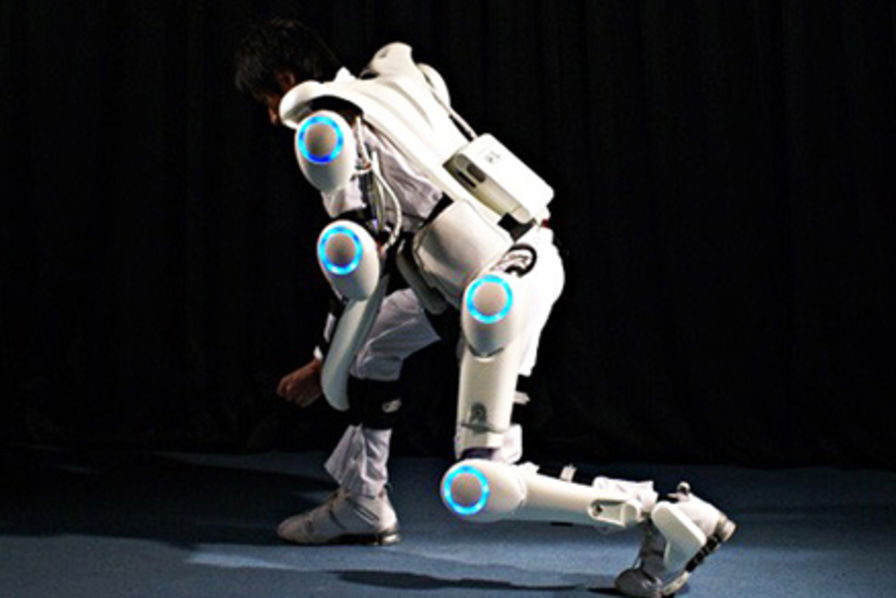
Il existe déjà des réalisations dans ces domaines. Je pense à TWIICE, spinoff de l’EPFL qui a conçu des exosquelettes remarquables pour les paraplégiques (mais ces exosquelettes ne suffiront pas pour les « Martiens » puisqu’ils ne prennent pas en charge le haut du corps). Je pense aux travaux réalisés par des étudiants de plusieurs disciplines à l’EPFL dans le cadre de l’Assistive Technologies Challenge (ATC) pour les mêmes besoins médicaux. Je pense aux exosquelettes HAL (Hybrid Assistive Limb) de la société japonaise Cyberdyne au Japon qui réalise des exosquelettes de rééducation à la marche mais aussi pour compenser les forces déficientes des travailleurs vieillissants ou tout simplement pour effectuer des travaux qu’un homme normal n’aurait pas la force d’effectuer. Son Cyborg portable (« wearable Cyborg »), « HAL 5 », qui renforce l’ensemble du corps, semble une excellente base de développement pour « nous », futurs Martiens.
Ce sont ces réalisations et les recherches qui continuent, qu’il convient de mettre ensemble et d’orienter vers les besoins des futurs astronautes, en prenant bien soin de les concevoir (1) pour un environnement martien particulièrement dur, notamment pour les articulations (poussières, températures, pression extérieure) ; (2) pour des hommes valides plutôt que pour des handicapés (les parties basses de l’exosquelettes pourront réagir aux stimuli provenant des muscles des pieds ou des jambes des astronautes). Ils seront en ce sens un peu différents de ceux qui sont actuellement étudiés à l’EPFL et plus proches des exosquelettes HAL de Cyberdyne mais nul doute que l’expertise développée dans le cadre du « Challenge » ATC comme dans celui de TWIICE ne donne une compétence pour adapter les avancées de HAL aux besoins de l’exploration martienne.
L’exosquelette devra être aussi léger que possible pour être facilement manié. Se pose surtout la question de le revêtir en apesanteur avant l’atterrissage pour ne pas avoir à le faire après, alors que tout effort physique sera devenu difficile. Dans cette éventualité, l’exosquelette doit être conçu pour ne pas blesser le corps lors de la décélération très forte du vaisseau spatial pendant la descente dans l’atmosphère.
Il devra ensuite pouvoir être porté pendant plusieurs jours sans devoir être retiré (il sera très difficile pour une personne affaiblie et non ou mal assistée de le revêtir ou de s’en défaire) et donc permettre toutes les fonctions dont celles ressortant de l’hygiène.
Il devra encore être adaptable au scaphandre utilisable pour les EVA (Extra Vehicular Activities) puisque les astronautes devront probablement sortir du vaisseau avant d’avoir récupéré toute leurs capacités motrices et musculaires. Alternativement un second exosquelette, « extérieur », pourrait être mis à disposition mais les responsables de missions spatiales s’efforceront toujours de surveiller avec le plus de rigueur possible leur budget de masse et de volume. En tout cas si l’exosquelette intérieur pouvait être utilisé pour l’extérieur, il devrait être adapté pour prendre en charge l’équipement de support vie de l’astronaute (ou purement et simplement intégré au scaphandre ?).
Enfin son autonomie énergétique devra être aussi grande que possible (avec indicateur d’énergie restant disponible et de distance parcourue) et les sources d’énergie (électriques, avec batterie rechargeable « embarquée »), devront être conçues pour être facilement manœuvrables et portables.
J’espère que des étudiants de l’EPFL voudront bien se lancer dans cette étude comme le font depuis deux ans d’excellents élèves de Master sous la supervision de Claude Nicollier et de moi-même dans le cadre d’eSpace, sur le sujet du dirigeable d’exploration robotique (…sujet que je vous présenterai une autre fois). Nous avons au sein de la Mars Society Switzerland des personnes compétentes, diplômés de la même « maison », qui pourraient les « coacher ».
Illustration de titre : HAL 5 (pour Hybrid Assistive Limb), exosquelette de la start-up Cyberdyne, spin-off de l’université japonaise de Tskukuba. Lire :
https://www.usinenouvelle.com/article/hal-l-exosquelette-japonais-teste-en-europe.N204055
https://www.cyberdyne.jp/english/products/HAL/
https://fr.wikipedia.org/wiki/Hybrid_assistive_limb
Nouvelles du JWST
Pendant ce temps là, l’origami du télescope Webb (JWST) continue à se déployer. Nous sommes (08/01/22) au 14ème jour après le lancement et la plupart des étapes essentielles et critiques ont été franchies: (1) déploiement du panneau solaire, (2) déploiement des feuilles du bouclier thermique et du pare-Soleil, (3) positionnement du miroir secondaire au bout de ses bras en vis à vis du miroir primaire, (4) déploiement de la partie gauche du miroir primaire (3 des 18 segments) et fixation, bloquée, à son corps central (12 des 18 segments). On attend aujourd’hui à 14h00 UTC (15h00 heure Europe continentale) le déploiement et la fixation de la partie droite du miroir (3 des 18 segments).
Le JWST est à 1.058.000 km de la Terre (08h00 ce matin). Nous nous rapprochons de la mise en orbite autour de L2 (1.500.000 km) mais n’y sommes pas encore. Il lui faut encore parcourir 390.000 km. La mise en orbite autour de L2 est prévue pour dans15 jours, à J+29 (le 23 janvier).
16h30 : ça y est, la partie droite du miroir primaire a été déployée et fixée!
Pour (re)trouver dans ce blog un autre article sur un sujet qui vous intéresse, cliquez sur :