
Intervention humaine encore nécessaire
C’est aujourd’hui une obligation en Suisse et presque partout ailleurs : une personne doit accompagner et constamment surveiller un véhicule automatisé ou autonome, assurant ainsi la sécurité des personnes et des biens environnants ainsi que le bon fonctionnement du véhicule. Cette personne peut, si besoin, prendre le contrôle du véhicule notamment lorsqu’il circule dans des zones où les signaux des systèmes de navigation par satellites (GNSS pour Global Navigation Satellite System – le GPS étant celui le plus connu) sont limités, voire indisponibles. En milieu urbain, il existe en effet de nombreuses zones d’ombre dans ces systèmes comme les passages sous les ponts, entre deux immeubles rapprochés ou encore dans les tunnels. L’accompagnateur de ces véhicules automatisés prend alors les commandes du véhicule jusqu’à ce que celui-ci retourne dans une zone où la réception satellite est satisfaisante.
Depuis l’automne 2020, un véhicule de livraison automatisé circule sur le campus de l’EPFL. Le Mobility Lab coordonne ce projet qui permet, entre autres, de tester une solution innovante visant à améliorer la précision des déplacements. Cette solution est fournie la startup suisse Fixposition.
Un positionnement au centimètre près
L’objectif de la startup zurichoise est de fournir des données de positionnement plus fiables et donc plus précises, en particulier dans les zones où les systèmes de navigation par satellites montrent leur limites.
Cette précision – au centimètre près ! – est obtenue grâce aux données du capteur Vision-RTK développé par la startup et à des algorithmes informatiques. En combinant l’analyse des images, les données de positionnement par satellite GNSS ainsi que les données inertielles, issues de capteurs d’accélération et de rotation, la navette gagne en autonomie et nécessite donc moins d’interventions humaines.
L’expérience menée sur le campus d’Ecublens montre des résultats très prometteurs en environnement réel. En observant l’image ci-dessous, on constate que la solution testée (tracé violet) conserve une précision au centimètre près sur l’ensemble du trajet, tandis que la solution basée uniquement sur le GNSS (tracés jaune et rouge) s’éloigne jusqu’à plusieurs mètres du tracé idéal dans les zones sous le pont, en bas à gauche sur l’illustration.
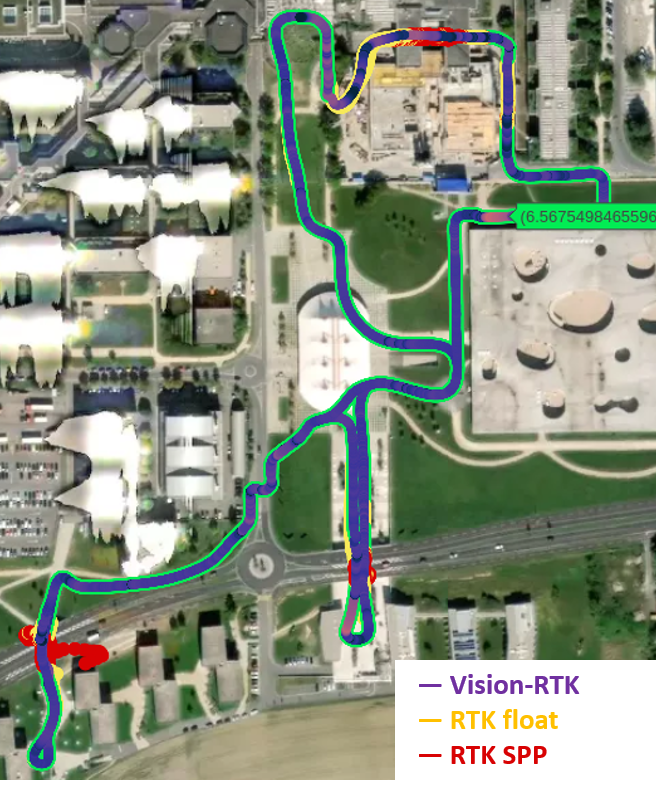
La différence est encore plus marquée dans les zones d’ombres, comme par exemple lorsque le véhicule s’engage sous le bâtiment du Rolex Learning Center. Ce passage dispose d’un très faible signal GNSS, ce qui a pour conséquence d’offrir une précision de positionnement que l’on peut qualifier de très approximative, voire aléatoire si on utilise uniquement cette information.
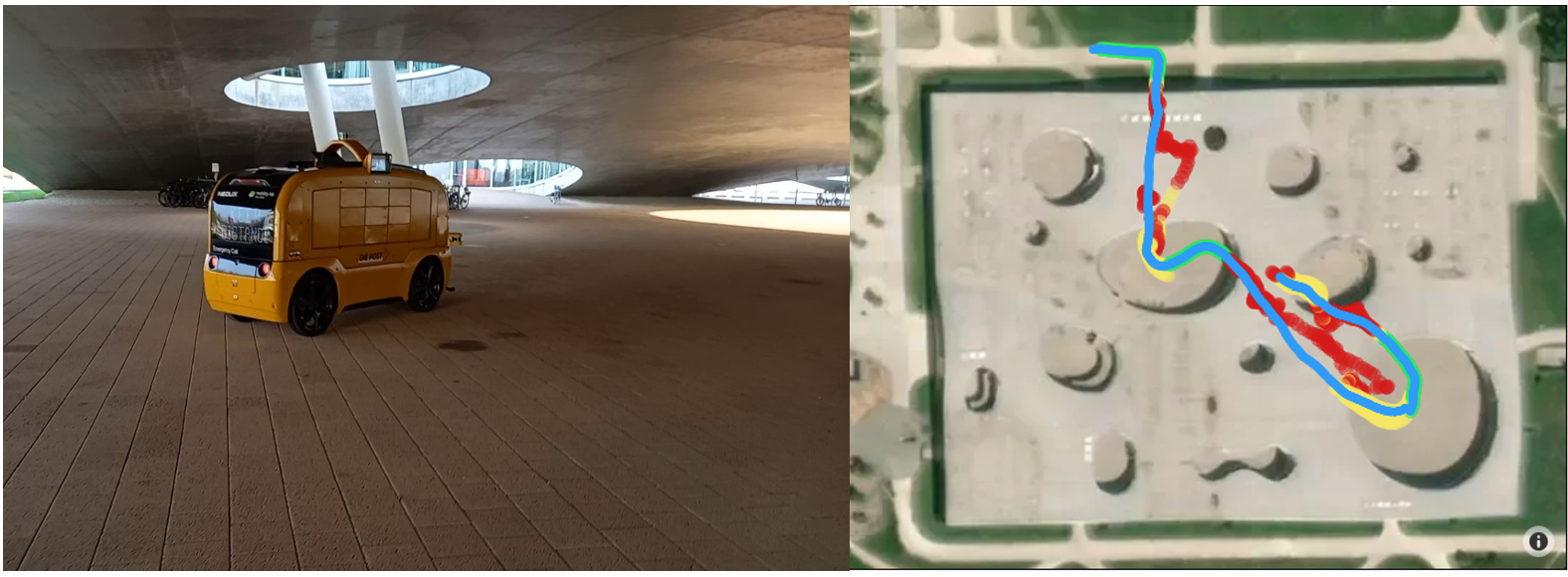
La solution proposée par Fixposition (tracé bleu sur l’image ci-dessus) conserve une grande précision y compris sous la couverture du toit, contrairement à la solution standard, dont les écarts atteignent plusieurs mètres. Il est intéressant de noter que la solution testée ne nécessite pas l’installation préalable de capteurs dans l’environnement du véhicule, tout est embarqué dans le véhicule lui même. Cette solution est donc particulièrement adaptée au développement des véhicules complètement autonomes.
Un pas de plus vers le développement de la conduite autonome
La position naturelle fournie par un GPS seul, donne une bonne idée de l’endroit où le véhicule se trouve, à quelques mètres près, mais n’est pas assez pécis pour permettre un travail de précision. Cela conduit à de trop fréquentes interventions des accompagnateurs de ces véhicules automatiques et freinent ainsi le développement des véhicules autonomes dans notre quotidien. En effet, quel peut bien être l’avantage des véhicules autonomes si on ne fait que remplacer l’habituel chauffeur par un accompagnateur ? Ces travaux qui consistent donc à améliorer la précision des positions des véhicules, notamment en environnement urbain où la couverture GNSS présente de nombreuses zones d’ombre, contribuent également à offrir des conditions de sécurité satisfaisantes pour le développement d’une future conduite réellement autonome.
Merci à Eric Imstepf et Anne-Muriel Brouet pour leur collaboration sur cet article ainsi que pour les images d’illustration.
ce n’est qu’un paramètre parmi d’autres , auquel il faut ajouter :
– le niveau d’entretien du véhicule, des freins, …
– la qualité de la chaussée, du revêtement, des conditions météo , …
– la détection des obstacles, ou autres véhicules , piétons, cyclistes, …
– les changements de présélections , dépassements , …, donc des marquages au sol , des signaux , …
(…)
quel temps faut-il à l’ordinateur pour digérer toutes les données captées et prendre la bonne décision ?
Bonjour M. Giot,
Vous avez tout à fait raison, il y a encore bien d’autres aspects à couvrir, qu’ils soient techniques ou légaux, avant de voir évoluer des véhicules 100% autonomes dans nos villes ou sur nos routes.
Yann Bocchi
thank you for sharing this article post
very good article and and I’m waiting for the next article