
Après les radiations, le problème le plus redoutable qui se pose à ceux qui veulent aller physiquement sur Mars est celui de l’apesanteur pendant le voyage, surtout pour les deux ou trois premières fois puisqu’il ne pourra pas y avoir de « comité d’accueil » à l’arrivée. Ce n’est cependant pas une raison suffisante pour se décourager puisque nous pouvons imaginer des solutions réalistes.
Notez bien que je ne vais pas développer le problème de la pesanteur réduite sur Mars (gravité 0,38 g) puisque je considère que la masse de la combinaison spatiale et de ses annexes (quelques 100 kg) sera heureusement supportable de ce fait (un corps humain de 70 kg avec son équipement de 100 kg ne pèsera que 65 kg). Je ne veux pas non plus développer l’interrogation qu’on peut avoir sur les conséquences de la force, non adaptée aux conditions de pesanteur locale, avec laquelle le cœur projettera le sang vers le cerveau. Mais j’ai bien conscience que cette force sera quelque peu excessive par rapport aux besoins. On ne pourra en estimer les conséquences que sur le long terme (sans doute à l’issue de la première mission, impliquant un séjour sur Mars de 18 mois).
Ce qui m’intéresse ici c’est le voyage proprement dit et ses conséquences lors du retour à la gravité, sur Mars (plus que sur Terre) pendant les toute premières missions.
Les méfaits de l’apesanteur sont connus : fonte des masses musculaire et osseuse ; mauvaise adéquation de la force des flux sanguins aux besoins des différentes parties du corps (mentionnée ci-dessus et dommageable en particulier pour le nerf optique) ; perte du sens de l’équilibre ; risque et présence dans l’atmosphère non seulement d’objets de toutes tailles non attachés mais aussi de poussières et de petits débris (on évite plus facilement les gros!).
La solution évidente, pour les premières missions, sera la mise à disposition des astronautes, d’exosquelettes lorsqu’ils se poseront sur Mars. Cela pourrait compenser la faiblesse musculaire et osseuse ainsi que la perte du sens de l’équilibre pendant les quelques jours nécessaires à la reprise du contrôle de son corps. D’où la nécessité de travailler sur des exosquelettes légers, peu volumineux et dont il sera facile de s’équiper même à l’intérieur du vaisseau spatial juste après l’atterrissage et avant la descente sur le sol de la planète.
D’autres dispositions seront à prendre pendant le vol lui-même.
On pense d’abord à l’exercice physique. Il faudra veiller à entretenir continument sa force musculaire, bien qu’elle soit devenue inutile sur le moment. Des appareils de musculation existent dans la Station Spatiale Internationale pour faciliter cet exercice et le problème qu’il pose n’est pas tellement la place mais surtout le temps qu’il prend. On évalue à deux heures par jour, minimum, celui qui convient pour pouvoir récupérer le plein usage de son corps dans un délai raisonnable après le retour en gravité.
La seconde solution, plus difficile à mettre en œuvre, est celle de la gravité artificielle. Robert Zubrin l’a proposée dès le début des années 1990. Le principe est le même, le recours à la force centrifuge, mais le contexte technologique a changé et la réflexion a avancé. La solution préconisée à l’époque par Robert Zubrin, consistait à mettre en rotation le couple formé par le vaisseau-habitat avec le dernier étage du lanceur, reliés entre eux par un filin (la mise en rotation intervenant après l’injection interplanétaire). Demain, si tout va bien, nous aurons le Starship. Cela ouvre des perspectives.
La première de ces perspectives serait « simplement » la mise en rotation de deux starships. On peut d’abord envisager qu’ils soient réunis par le nez ou par la base. Par le nez serait particulièrement délicat car cette partie du vaisseau est très exposée au flux du plasma ultra-chaud lors de la rentrée dans l’atmosphère et doit être le plus possible exempte de prise à leur agression (pression et chaleur). On peut alternativement envisager qu’ils soient réunis par la base. Il est prévu actuellement qu’ils le soient pour la recharge en ergols en orbite de parking terrestre. On peut envisager que le « docking » se fasse en douceur en utilisant une rétropropulsion de faible puissance par des jets situés à l’extrémité des ailerons, en sauvegardant les retrorockets latérales permettant les corrections d’attitude. A partir de là (contact et accrochage) les deux vaisseaux pourraient s’éloigner quelque peu l’un de l’autre, chacun des trois ailerons dévidant un câble ou mieux étirant une tige relativement rigide stockée, enroulée, à l’intérieur. Etant donné que le plancher de la partie habitable de chaque vaisseau se trouverait à 30 mètres de sa base, on aurait au minimum un axe de 60 mètres de longueur. Une rotation « lente » de deux tours par minute, permettrait une gravité* relativement faible mais suffisante pour restituer au moins le sens de la verticalité sans créer de distorsion sensible entre la tête et les pieds et sans générer de force de Coriolis1 trop gênante.
*La formule est : F = (0,0011)W2R
où « F » est la force de gravité en « g » terrestres ; « W » est la vitesse de rotation en nombre de tours par minutes ; « R » est la longueur du bras de rotation (en mètres).
Avec les 60 mètres (bras de rotation de 30 mètres), on aurait une gravité de 0,13g. Ce n’est pas beaucoup (la gravité sur la Lune est de 0,16g et elle est sur Mars de 0,38g). Si on parvenait à distancier les deux Starships par des tiges de 15 mètres, on aurait une gravité de 0,2g, ce qui serait préférable.
Deux autres propositions2, que je trouve très intéressantes car elles vont plus loin (et semble a priori plus sures que la liaison par tiges rigides), ont été faites par le CG (« Computer Graphic ») designer de SpaceXvision, Roger Bootsma (Vienne, Autriche) et par Mike DeRosa (alias « Smallstars »). A noter que les deux ne sont pas ingénieurs mais les idées naissent souvent dans des esprits fertiles qui ne sont pas forcément ceux qui vont les développer et les préciser.
La proposition de Roger Bootsma, suppose de retravailler la coque du Starship. Comme vous le voyez sur les illustrations de titre et ci-dessous, l’habitat (le haut du Starship) se sépare en deux parties (“split”) qui, après l’injection interplanétaire, s’éloignent progressivement de l’axe central, aux bouts d’une structure métallique rigide qui se déploie de façon télescopique. L’ensemble est mis en rotation autour de l’axe, créant ainsi une gravité artificielle dans les deux parties séparées et la structure métallique qui les relie à l’axe peut servir de moyen de communication entre elles, y compris physique.
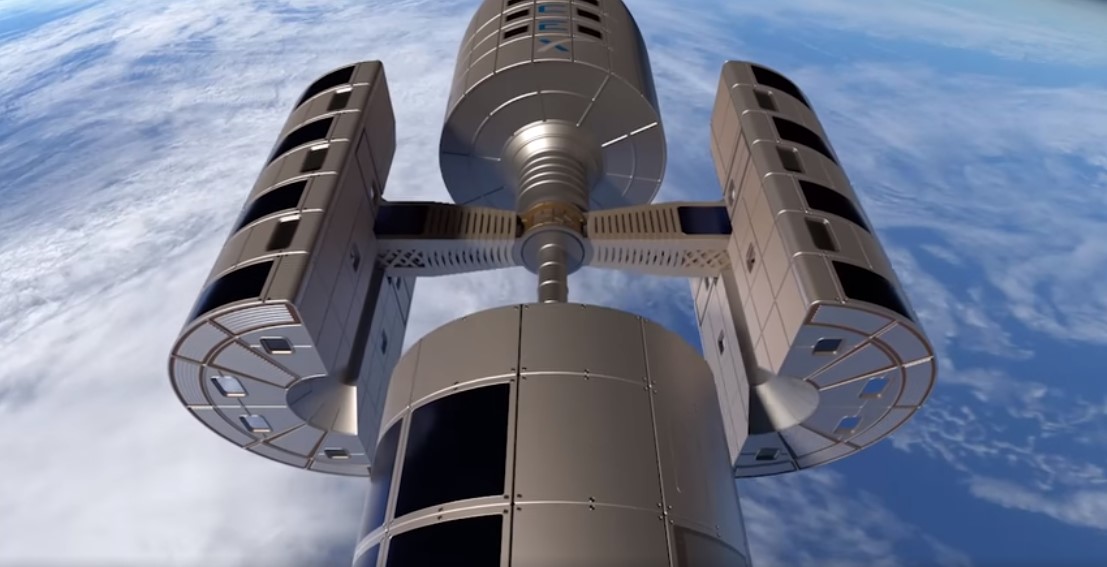 Proposition de Roger Bootsma. Les deux parties de l’habitat viennent de se séparer et la structure télescopique qui les tient à l’axe se déploie lentement.
Proposition de Roger Bootsma. Les deux parties de l’habitat viennent de se séparer et la structure télescopique qui les tient à l’axe se déploie lentement.
La proposition de Mike DeRosa, « GLS » (« Gravity link Starship », 16/09/19), me semble moins difficile à réaliser que le « split de l’habitat » et donc sans doute encore plus réaliste, car rien ne s’opposera à ce qu’on puisse l’appliquer dès que le Starship volera. Elle repose sur un vol de concert de 3 vaisseaux dont deux seront habités et le troisième servira de hub aux deux autres. Le vaisseau-hub est chargé au départ de la Terre d’une double charpente métallique déployable chacune sur 100 mètres, à partir de l’axe du vaisseau. Ces deux bras sont l’équivalent de la structure du concept de Roger Bootsma. Aux extrémités de chacun des bras, une fourche d’un écartement de 9 mètres sert à enserrer un vaisseau par son diamètre. Juste après l’injection interplanétaire et après que les 3 starships se soient rapprochés, la charpente est déployée robotiquement de part et d’autre du Starship-hub. Chacun des deux vaisseaux-habitat vient se loger dans la fourche du bras de la charpente qui est d’abord ouverte puis refermée sur lui à hauteur de leur sas (rappelons que SpaceX prévoit ce genre de fourche pour saisir les lanceurs de Falcon 9 puis de Starship lors de leur retour sur Terre, juste avant qu’ils touchent le sol). Une fois les starships-habitats enserrés dans leur fourche, la formation des trois vaisseaux est mise en rotation. Pour ce faire, l’un des deux vaisseaux-habitats effectue d’abord une rotation à l’intérieur de sa fourche pour se positionner, toujours en parallèle, le nez pointé vers la direction opposée à son homologue. Une fois les deux starships ainsi positionnés, ils impulsent, par chacun de leur système de rétropropulsion, une faible rotation à l’ensemble. Une fois la rotation impulsée, chacun des deux vaisseaux-habitat tourne son nez naturellement, sous l’effet de la force centrifuge, vers le vaisseau-hub puisque le sas où est placé la fixation de la charpente déployée est situé au-dessus du centre de gravité des vaisseaux, et la rotation crée à l’intérieur des vaisseaux-habitat une gravité artificielle. Cette gravité est d’autant plus importante qu’on s’éloigne du centre de gravité commun (c’est-à-dire du vaisseau-hub). Une rotation de trois tours par minute sur un bras de rotation de 100 mètres permettrait d’atteindre 1g au niveau du sas. Cette vitesse de rotation est une limite supérieure, d’autant que, plus la vitesse de rotation est élevée plus on peut ressentir la force de Coriolis et plus le différentiel de gravité entre la tête et les pieds devient perceptible. On choisira sans doute pas plus de 2 tours/minute pour aller vers Mars (0,44g dans le sas, 0,53g dans le poste de pilotage) et, partant de 0,38g en revenant de Mars, on reviendra progressivement vers ces 2 tours/minute en les dépassant vers 3, sans les atteindre nécessairement, pour les deux derniers mois. A l’approche de Mars et, au retour, de la Terre, les vaisseaux se remettront en parallèle, les deux vaisseaux-habitats en sens contraire, et ils donneront une série de micro-impulsions pour annuler la rotation. Les deux vaisseaux habitats se remettront dans la même direction ; la charpente sera repliée et réinsérée à l’intérieur du sas du vaisseau-hub et chacun à l’intérieur des trois vaisseaux, se préparera à la rentrée dans l’atmosphère.
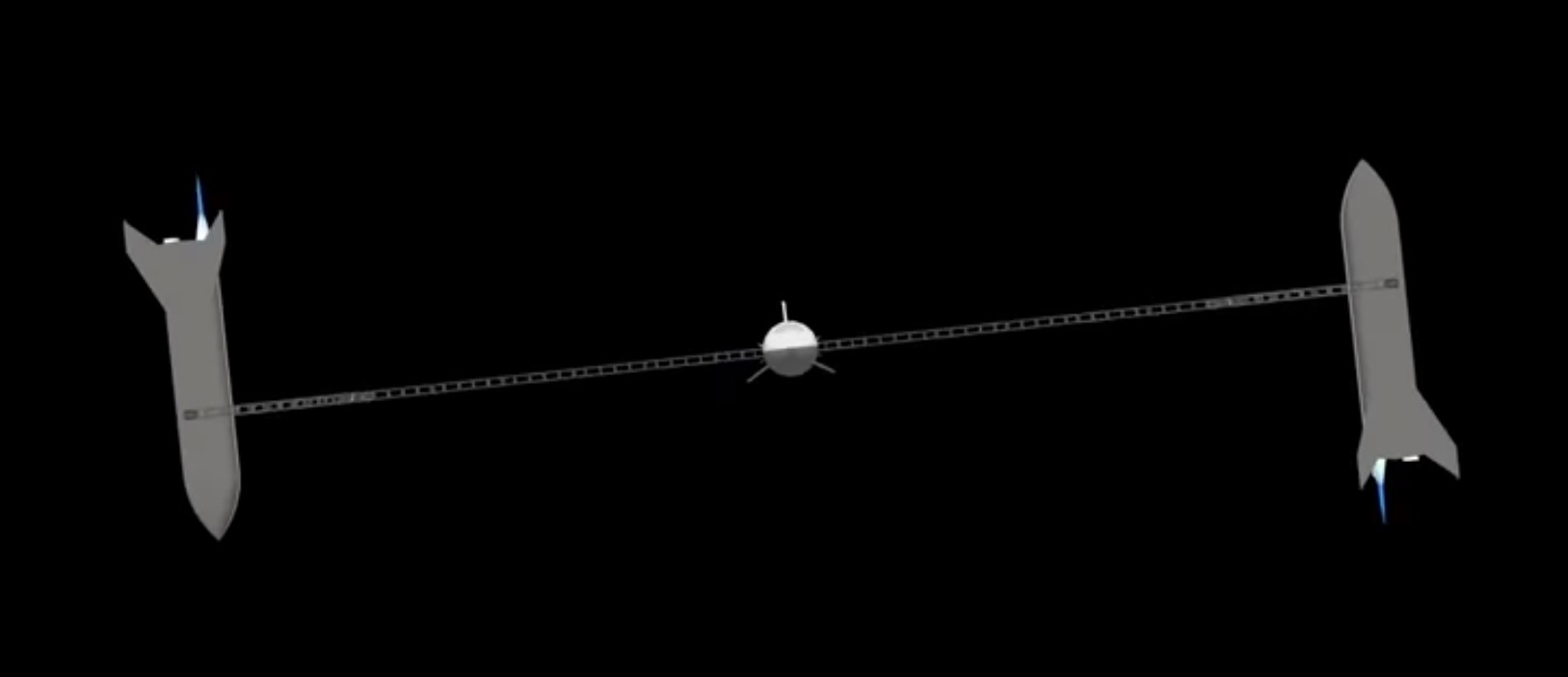 Proposition de Mike DaRosa. Après déploiement de la charpente télescopique, les deux vaisseaux-habitat orientés en sens contraire, impulsent une rotation à l’ensemble.
Proposition de Mike DaRosa. Après déploiement de la charpente télescopique, les deux vaisseaux-habitat orientés en sens contraire, impulsent une rotation à l’ensemble.
Voici donc une solution simple et élégante qui ne semble pas impossible à mettre en œuvre. Le vol de trois vaisseaux de concerts permet de donner une certaine sécurité à la mission (redondance). Pendant le voyage, les hommes de chacun des vaisseaux pourraient se retrouver dans le vaisseau-hub, dont le volume serait évidemment en apesanteur mais qui procurerait un peu plus d’espace « habitable » et un lieu pour manipuler et travailler des équipements massifs. En alternative, dans le cadre de ce concept, on peut envisager que seuls les deux vaisseaux-habitat descendent sur le sol de Mars tandis que le vaisseau-hub reste en orbite. On économiserait ainsi les ergols nécessaires pour descendre sur Mars et en remonter pour un des vaisseaux mais il faudrait (1) envisager l’entretien du vaisseau en orbite pendant les 18 mois du séjour sur Mars et (2) sans doute réapprovisionner ce vaisseau avec un supplément d’ergols pour le retour de la flottille sur Terre (le calcul reste à faire !).
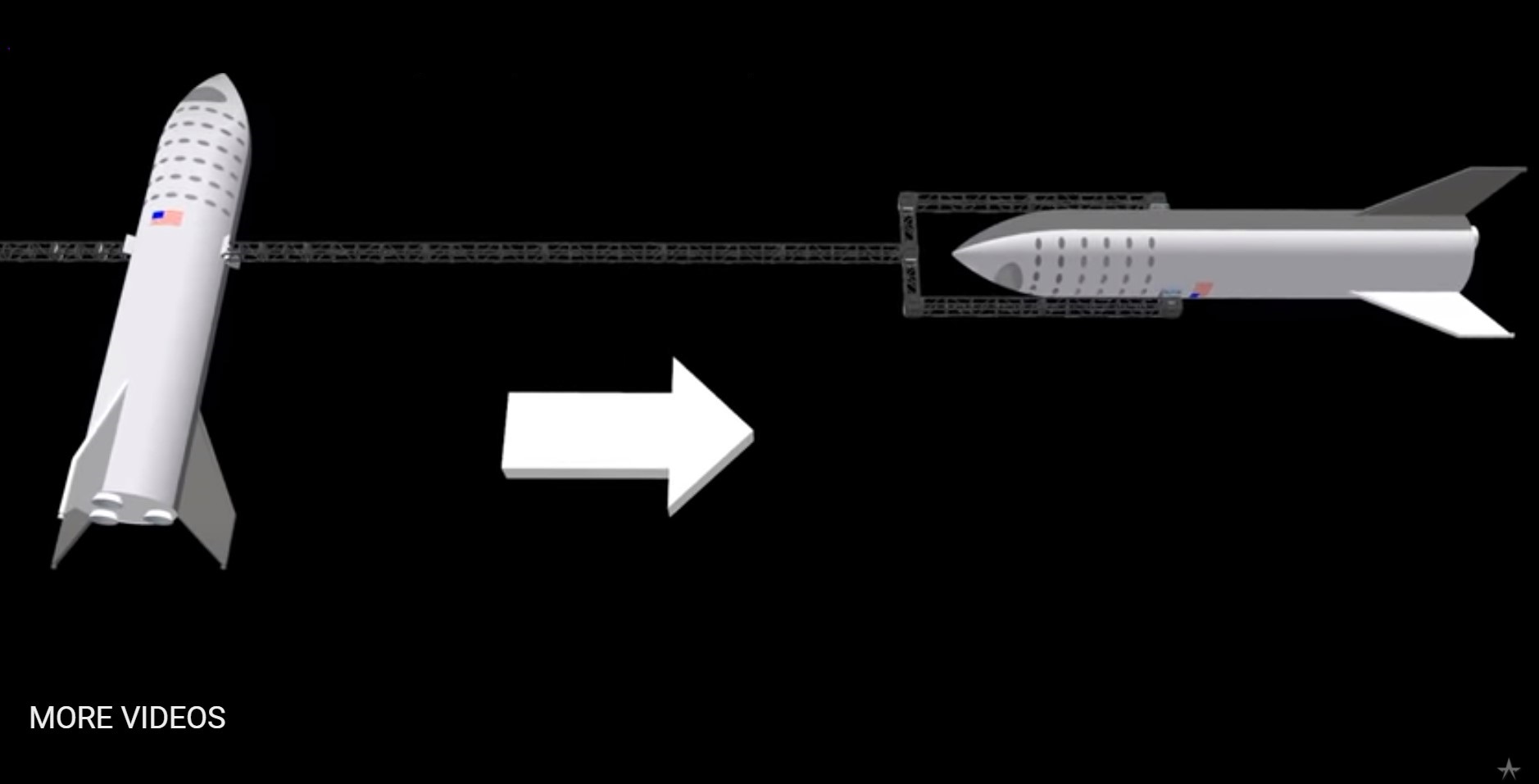 Proposition de Mike DaRosa. Une fois la rotation impulsée, elle induit naturellement le positionnement des vaisseaux-habitat perpendiculairement au vaisseau-hub, permettant que la force de gravité s’exerce vers les planchers des vaisseaux-habitats.
Proposition de Mike DaRosa. Une fois la rotation impulsée, elle induit naturellement le positionnement des vaisseaux-habitat perpendiculairement au vaisseau-hub, permettant que la force de gravité s’exerce vers les planchers des vaisseaux-habitats.
J’ai donné ces deux exemples pour montrer que contrairement à ce que pensent les pessimistes, recréer une gravité artificielle n’est pas une fantaisie irréalisable qui ressort uniquement de la science-fiction. Par ailleurs, même si, après les premiers vols, lorsqu’il y aura une base permanente sur Mars, les passagers d’un long voyage pourront être accueillis et « soignés » pour récupérer leur sens de l’équilibre ainsi que leur masse musculaire et osseuse, il serait quand même préférable d’éviter d’être obligé à cette rééducation. La gravité artificielle reste donc plus que souhaitable aussi bien pour après-demain que pour demain. Vous verrez, on la mettra au point d’une manière ou d’une autre et lorsque l’homme parviendra sur Mars, en pleine forme, il pourra immédiatement agir.
*NB1 : La force de Coriolis a des effets d’autant plus marqués que la vitesse de rotation est élevée et que le bras de rotation est court. C’est pour cela qu’il vaut mieux ne pas dépasser deux tours par minute et essayer d’atteindre une longueur de bras de rotation de 100 mètres. Par ailleurs, le différentiel de gravité entre la tête et les pieds est d’autant plus faible que le bras de rotation est long (simple rapport entre 1,80 mètre et la longueur de ce bras).
**NB2 : Une autre proposition de restitution d’une certaine gravité a été faite par Pierre-André Haldi le 4 avril 2017 sur ce blog, « un nouveau concept de système de transport modulaire pour aller sur Mars » : https://blogs.letemps.ch/pierre-brisson/2017/04/04/un-nouveau-concept-modulaire-de-systeme-de-transport-spatial-a-destination-de-mars/
Les illustrations sont des captures d’écran avec autorisation de Roger Bootsma. Je ne suis pas parvenu à joindre Mike DeRosa (« Smallstars »). L’illustration de titre montre le starship envisagé par Roger Bootsma avec son dispositif rotatif déployé et en fonction.
Références / liens :
https://www.facebook.com/watch/?v=300527688332434
https://spacexvision.com/home/blog/
https://www.universetoday.com/143368/real-artificial-gravity-for-spacexs-starship/
https://www.facebook.com/SpaceXvision/
Force de Coriolis : https://fr.wikipedia.org/wiki/Force_de_Coriolis